
មនុស្សយន្តជើងបួនភាគច្រើនត្រូវបានហ្វឹកហ្វឺនដើម្បីរក្សាលំនឹងរបស់វាឡើងវិញ ប្រសិនបើពួកគេជំពប់ដួលលើឧបសគ្គ។ Tech Xplore ថ្មីៗនេះបានរាយការណ៍ថា ក្នុងកិច្ចខិតខំប្រឹងប្រែងដើម្បីអភិវឌ្ឍមនុស្សយន្តលាងសម្អាត និស្សិតបណ្ឌិតជនជាតិវៀតណាម-អាមេរិកាំង Joanne Truong នៅសាលាកុំព្យូទ័រអន្តរកម្មនៅវិទ្យាស្ថានបច្ចេកវិទ្យាហ្សកហ្ស៊ី (GIT) និងសហការីពីរនាក់របស់នាងគឺ Naoki Yokoyama និង Simar Kareer កំពុងហ្វឹកហាត់មនុស្សយន្តរបស់ពួកគេឱ្យដើរពីលើវត្ថុរញ៉េរញ៉ៃដែលវាអាចជួបប្រទះនៅក្នុងផ្ទះ។

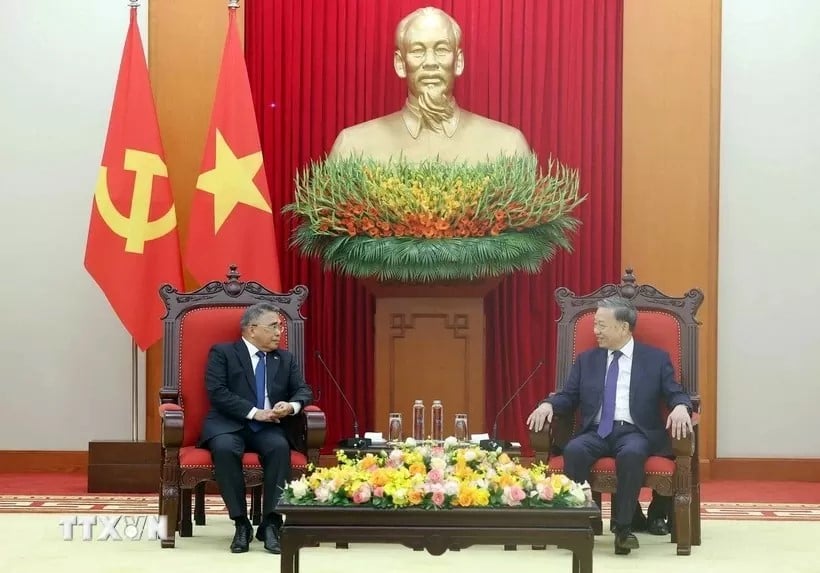
(ពីឆ្វេង) Naoki Yokoyama, Joanne Truong និង Simar Kareer ធ្វើការជាមួយមនុស្សយន្តជើងបួន
យោងតាមក្រុមស្រាវជ្រាវ មនុស្សយន្តជើងបួនដែលបំពាក់ដោយឧបករណ៍បញ្ជាចលនា "ពិការភ្នែក" មានទំនោរមានប្រតិកម្មកាន់តែច្រើន ដើម្បីជៀសវាងការធ្លាក់នៅពេលពួកគេដើរលើវត្ថុមួយ។
ទន្ទឹមនឹងនោះ ក្រុមស្រាវជ្រាវបានអនុម័តវិធីសាស្រ្តថ្មីមួយ ដោយផ្តល់នូវរូបភាពផ្ទាល់សម្រាប់មនុស្សយន្តដើម្បីឈានជើងឆ្លងកាត់ឧបសគ្គ តាមរយៈការរួមបញ្ចូលគោលនយោបាយរុករកជាមួយនឹងគោលការណ៍ចលនាផ្អែកលើរូបភាព។ វិធីសាស្រ្តនេះបានជួយមនុស្សយន្តជំនះឧបសគ្គនៅក្នុងបរិយាកាសក្លែងបន្លំដែលមានអត្រាជោគជ័យ 72.6% ។
មនុស្សយន្តអាចរៀនដោយខ្លួនឯង ហើយមិនយកតម្រាប់តាមគំរូអាកប្បកិរិយាដែលមានពីមុនមកនោះទេ។ អ្នកស្រាវជ្រាវនិយាយថា គំរូនេះអាចធ្វើមាត្រដ្ឋានបាន ហើយអាចអនុវត្តបានភ្លាមៗដោយមិនចាំបាច់ធ្វើការកែតម្រូវច្រើន។ គោលការណ៍ទាំងនេះណែនាំមនុស្សយន្តពីរបៀបជៀសវាងវត្ថុនៅពេលផ្លាស់ទីពីកន្លែងមួយទៅកន្លែងមួយ និងរបៀបប្រើជើងរបស់វាដើម្បីជាន់ពីលើវត្ថុ រួមទាំងរបៀបលើកជើងរបស់វាទៅកម្ពស់សមរម្យ។
'ឆ្កែមនុស្សយន្ត' យកឈ្នះលើផ្លូវរដិបរដុបដ៏វែងដោយមិនដួល
យោងតាមក្រុមស្រាវជ្រាវ មនុស្សយន្ត quadruped ធម្មតាអាចមើលឃើញតែរូបភាពពិភពពិតតាមរយៈកាមេរ៉ាខាងមុខ ហើយមិនអាចមើលឃើញវត្ថុនៅជិតជើងរបស់ពួកគេ។ ក្រុមការងារបានបញ្ចូលការចងចាំ និងការយល់ដឹងពីលំហទៅក្នុងបណ្តាញ ដើម្បីបង្រៀនមនុស្សយន្តឱ្យច្បាស់នៅពេល និងកន្លែងដែលត្រូវដើរឆ្លងកាត់ឧបសគ្គ។ ប្រសិនបើវត្ថុនោះខ្ពស់ពេក មនុស្សយន្តអាចដើរជុំវិញវាបាន។ លោក Truong បាននិយាយថា "យើងបានរកឃើញថាវិធីសាស្ត្រនេះរុករកបានយ៉ាងល្អ ហើយទោះបីជាមនុស្សយន្តដើរខុសផ្លូវក៏ដោយ វាដឹងថាវាអាចដើរថយក្រោយ និងត្រឡប់ទៅទីតាំងដើមវិញ" ។ ក្រុមការងារក៏បានបង្រៀនមនុស្សយន្តថា វត្ថុណាដែលវាគួរបោះពីលើ ដូចជាប្រដាប់ក្មេងលេង និងវត្ថុណាដែលវាគួរដើរជុំវិញ ដូចជាតុ និងកៅអីជាដើម។
ការរកឃើញរបស់ក្រុមនេះក៏អាចជួយមនុស្សយន្តរុករកបរិយាកាសខាងក្រៅក្នុងពិភពពិត ដោយជ្រើសរើសផ្លូវដោយផ្អែកលើបំណងប្រាថ្នារបស់ម្ចាស់របស់ពួកគេ ដើម្បីជៀសវាងដីភក់ ឬថ្ម។
ការស្រាវជ្រាវបានឈ្នះរង្វាន់ទីមួយនៅក្នុងសិក្ខាសាលាមនុស្សយន្តនៅឯសន្និសីទមនុស្សយន្តឆ្នាំ 2022 នៅប្រទេសនូវែលសេឡង់។ ការស្រាវជ្រាវនឹងត្រូវបានបង្ហាញនៅក្នុងសន្និសីទអន្តរជាតិស្តីពីមនុស្សយន្ត និងស្វ័យប្រវត្តិកម្មនៃសង្គមវិស្វករអគ្គិសនី និងអេឡិចត្រូនិច (IEEE-USA) នៅទីក្រុងឡុងដ៍ (ចក្រភពអង់គ្លេស) ចាប់ពីថ្ងៃទី 29 ខែឧសភា ដល់ថ្ងៃទី 2 ខែមិថុនា។
ប្រភពតំណ
![[រូបថត] ភរិយារបស់អគ្គលេខាធិកា To Lam និងភរិយារបស់នាយករដ្ឋមន្ត្រីជប៉ុនធ្វើនំអង្ករបៃតងរួមគ្នា](https://vstatic.vietnam.vn/vietnam/resource/IMAGE/2025/4/27/7bcfbf97dd374eb0b888e9e234698a3b)

![[រូបថត] ភរិយារបស់នាយករដ្ឋមន្ត្រីជប៉ុនទៅទស្សនាសារមន្ទីរស្ត្រីវៀតណាម](https://vstatic.vietnam.vn/vietnam/resource/IMAGE/2025/4/27/8160b8d7c7ba40eeb086553d8d4a8152)

![[រូបថត] កាំជ្រួចបំភ្លឺមេឃហាណូយ ដើម្បីអបអរសាទរទិវាបង្រួបបង្រួមជាតិ](https://vstatic.vietnam.vn/vietnam/resource/IMAGE/2025/4/28/5b4a75100b3e4b24903967615c3f3eac)












![[រូបថត] ការហាត់សមទូទៅនៃក្បួនដង្ហែរដើម្បីអបអរសាទរថ្ងៃឈប់សម្រាកថ្ងៃទី ៣០ ខែមេសា](https://vstatic.vietnam.vn/vietnam/resource/IMAGE/2025/4/27/108ed9566ab24a16a67429edcafccac2)












![[រូបថត] សាក្សីរស់នៃថ្ងៃរំដោះរបស់ប្រទេសមានវត្តមាននៅឯការតាំងពិព័រណ៍អន្តរកម្មនៃកាសែត Nhan Dan](https://vstatic.vietnam.vn/vietnam/resource/IMAGE/2025/4/27/b3cf6665ebe74183860512925b0b5519)





























































Kommentar (0)